
面形测得好不好,先看位姿对不对。猫眼要解决的,正是让被测镜和CGH之间保持“该有的姿态”。
在非球面检测这个行当里,CGH的本事大家都有所耳闻——它能生成一个和被测自由曲面完美匹配的参考波前,让复杂曲面变得“可测”。
但有一个前置问题,比面形精度更基础,却经常被新手忽略:在开始测量之前,你怎么确认被测镜和CGH之间的位姿是理论设计状态?
镜子歪了一点、偏了一点、远了一点或近了一点,干涉条纹都会变。而这些变化很容易被误读成面形误差——你以为镜子表面有问题,其实是位姿没摆对。
猫眼结构,正是CGH检测系统中专门用来解决这个问题的。
位姿不准:一个容易吃哑巴亏的坑
先讲一个实际情境。
你在检测一块凹非球面镜。CGH设计好了,光路搭好了,干涉条纹出来了。你凭经验把镜子调了调,条纹看起来挺好看,PV值也漂亮,心里松了口气。
但三个月后,这块镜子装进系统,成像质量不达标。追查一圈,发现曲率半径和设计值差了十几微米。
问题出在哪?检测的时候,镜子没在理论位姿上。 你以为调到了“最佳条纹”,实际上是用位姿偏差去补偿了曲率半径的加工误差——两个错误互相抵消,造出了一个自洽但偏离真值的假象。
更隐蔽的是,如果镜子本身曲率半径就有问题,而你又没有把位姿精确控制在理论值上,测出来的面形数据就成了一笔糊涂账:到底几分是面形问题,几分是位姿问题,根本掰扯不清。
这个坑,怎么绕开?猫眼。
猫眼怎么保证理论位姿?
在CGH检测系统中,猫眼结构的核心任务很明确:保证被测镜与CGH之间保持理论位姿。
什么叫理论位姿?就是设计阶段严格计算好的那个空间关系——轴向距离是多少、倾斜多少、偏心多少,全部有明确的设计值。猫眼的全部工作,就是确保实际装调出来的位姿,和这些设计值对上。
具体怎么操作?我们用一个常见的检测场景来拆解。
场景:检测一块凹非球面反射镜
CGH上设计有一个对准全息区域,这个区域投射出的光经过被测镜反射后,会形成一个猫眼像——通常是一个清晰聚焦的光斑。
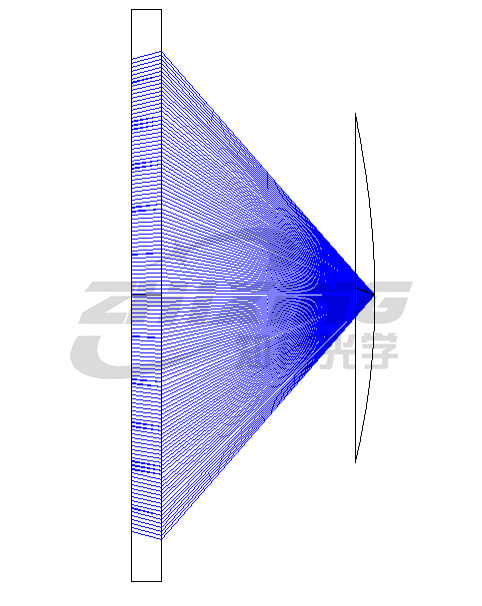
图1 猫眼检测光路
操作流程如下:
1.粗调:将被测镜和CGH装夹到位,轴向距离、倾斜、偏心都调到接近理论值。
2.猫眼精调:观察对准全息投射的猫眼像。当被测镜的位姿逐渐逼近理论值时,猫眼像会趋向一个预设的最佳形态。
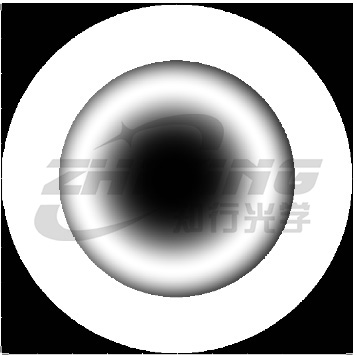
图2 位姿正确时的猫眼像

图3 位姿错误时的猫眼像(存在轴向距离误差及倾斜)
3.锁定位姿:一旦猫眼像达到预设标准,说明被测镜已经处于理论位姿。此时锁定所有调节机构,开始面形检测。
猫眼在这里起的作用,本质上是一个高灵敏度的“到位指示灯”。 它告诉你什么时候镜子的位姿“到位了”。而到位之后测出来的面形数据,才是镜子在理论位姿下的真实表现。
一个真实案例:球差从哪来?仿真给出了答案
道理讲清楚了,来看一个实际的工程情境。这个案例的排查过程,很多现场工程师可能会有共鸣。
有一块非球面镜片,先用DUI非接触式轮廓仪进行面形检测。轮廓仪通过光学探针扫描镜面轮廓,直接获取表面形貌数据。测出来的结果没什么问题,面形看起来挺干净。
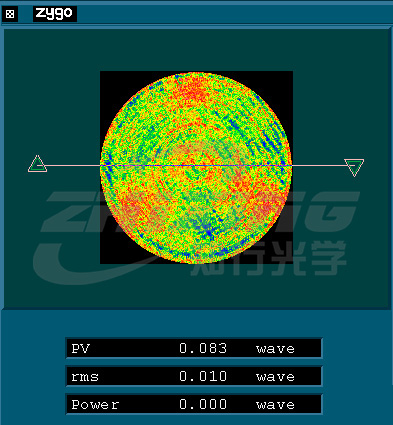
图4 DUI测试结果
同一块镜片,换到CGH检测系统上复测。猫眼对准到位,位姿锁定在理论值,结果出来了——面形上赫然出现一个很大的球差。
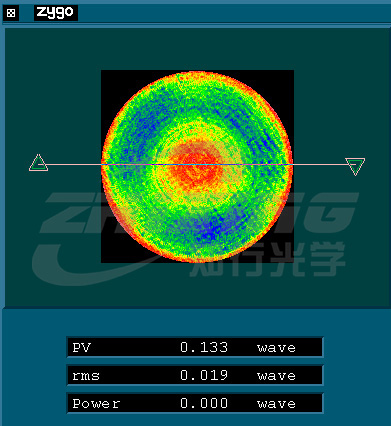
图5 CGH测试结果
两份报告摆在桌上。DUI说面形没问题,CGH说面形有大球差。信谁?
为了查清楚这个球差的来源,用DUI对这块镜片的曲率半径进行了测量。非接触式轮廓仪可以直接扫描母线来拟合曲率半径,不依赖外部参考波前。测量结果出来了——实测曲率半径和理论值之间差了112μm。
接下来做了一件事:将这个曲率半径偏差,代入到CGH检测系统的光学仿真模型中。 仿真结果出来后,和CGH的实测面形数据一比对——两者高度吻合。这个大球差,正是曲率半径偏差在理论位姿下该有的表现。
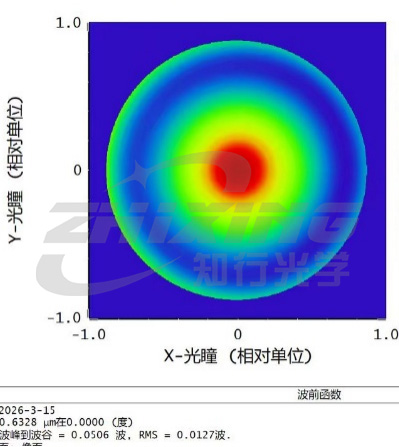
图6 仿真结果
链条就此闭合:曲率半径有偏差 → 理论位姿下应该出现球差 → CGH实测球差与仿真一致 → CGH测到的是真实的。
DUI之前为什么没在面形结果里看到明显球差?因为非接触式轮廓仪在扫描面形时,测量坐标系和镜子的机械基准之间的对应关系,取决于装夹姿态。如果没有严格将镜子锁定在理论位姿下,曲率半径偏差引起的面形分量可能被测量姿态的变化所稀释,在数据处理中又被进一步平滑,最终在面形报告里表现得“不扎眼”。
但曲率半径的测量不会说谎——DUI实测的曲率半径数值偏离了理论值,这个偏差量放入仿真后,恰好等于CGH测出的球差。
CGH+猫眼的组合厉害在哪?它把面形误差和曲率半径误差拆开了。 位姿定死,曲率半径偏了就是球差,没处藏。而且这个球差是可以被仿真复现的——不是莫名其妙冒出来的,是曲率半径偏差在理论位姿下的必然表现。
对一线操作者意味着什么?
猫眼保证理论位姿这件事,给现场检测带来的变化很实在:
位姿有据可依:不再凭“条纹好不好看”来判断镜子摆没摆对。猫眼像是独立于条纹的、定量的位姿判断标准。
面形数据可信:位姿被定死了,测出来的就是镜子本身的真实面形。曲率半径有问题,面形就如实反映离焦,不会被错误位姿掩盖。
可复现:换了操作者,猫眼像的标准不变。张三调的位姿和李四调的位姿,是同一个位姿。
不同仪器之间数据“打架”时,知道怎么判断:CGH有猫眼锁位姿,测出来的是理论位姿下的真实面形。其他方式如果位姿没有被严格锁定,“好看”的数据未必就是对的——这时候不妨单独测一下曲率半径,往往能找到答案。
最后
CGH检测系统中,最常被提起的是波前补偿——那是面形精度的保证。但波前补偿的前提,是被测镜和CGH之间的位姿是理论设计状态。
猫眼,就是那个锁定位姿的“定海神针”。
它把位姿定住了,镜子的真实面形才能原形毕露。曲率半径对就是对,错就是错。什么都不藏着掖着。
而这,恰恰是精密检测最需要的东西:真实。
服务热线
微信客服





